

传感器优化布局软件
根据叶尖定时振动辨识算法可知,传感器布局将直接影响叶尖定时振动参数的辨识结果。叶片振动测量传感器优化布局软件(BttSensorPlacement),利用最优化理论和算法,计算得出某级N支传感器的最佳布局位置,目的在于提高叶尖定时振动参数辨识结果的准确性。即:1)能够根据叶片数、发动机安装限制,计算所需的传感器数量和最优化的安装位置布局;2)可给出最优化传感器数量和安装位置布局条件下测量结果的置信度。
传感器布局方式可分为手动布局、约束布局、等空间布局和任意布局4种。不同的布局方式代表不同的计算方式。
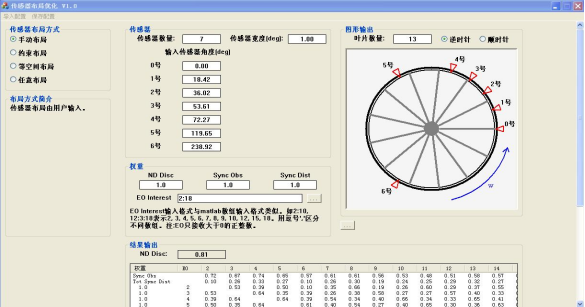
图 传感器优化布局软件
(1)ND区分度(nodal diameter discrimination)
用于异步振动分析。当叶盘片整体发生振动,通过N支传感器的叶尖振动数据可计算节径(ND)值。ND区分度评价指标体现的是该计算算法的准确性和难易程度。如果ND区分度越高,准确的ND值与其他可疑ND值区分性越大,更容易计算出正确的ND值。
(2)同步EO可辨识性(synchronous order observability)
用于同步振动分析。当叶片发生同步振动,需借助多支传感器计算振动频率与转速的比值,即激励阶次(EO,倍频因子),还原叶片振动的真实频率、振动幅值。对于某一感兴趣的EO值,传感器布局不同,导致计算难度不同、准确性不同。同步EO可辨识性评价指标体现的是EO、振幅的计算难度、准确性、抗噪声能力。该指标尤其适用于CFF算法计算振幅。
(3)同步EO区分度(synchronous order distinguishability)
用于同步振动分析。当叶片发生同步振动,需借助多支传感器计算振动频率与转速的比值,即激励阶次(EO,倍频因子)。同时,随转速变化,叶片将经历多个EO值的同步振动。专利技术自动还原所有EO值。但有可能会受到两个EO值之间的干扰,导致计算错误。同步EO区分度评价指标体现的是两个EO值之间或某一EO值与其他所有EO值间区可区分程度(不同EO值间抗干扰能力)。该指标适用于CFF方法中自动计算EO值的过程。

传感器优化布局软件
